| 扭矩传感器在机器人关节上的应用 |
| 来源: 点击数:1380次 更新时间:2022/2/4 11:25:55 |
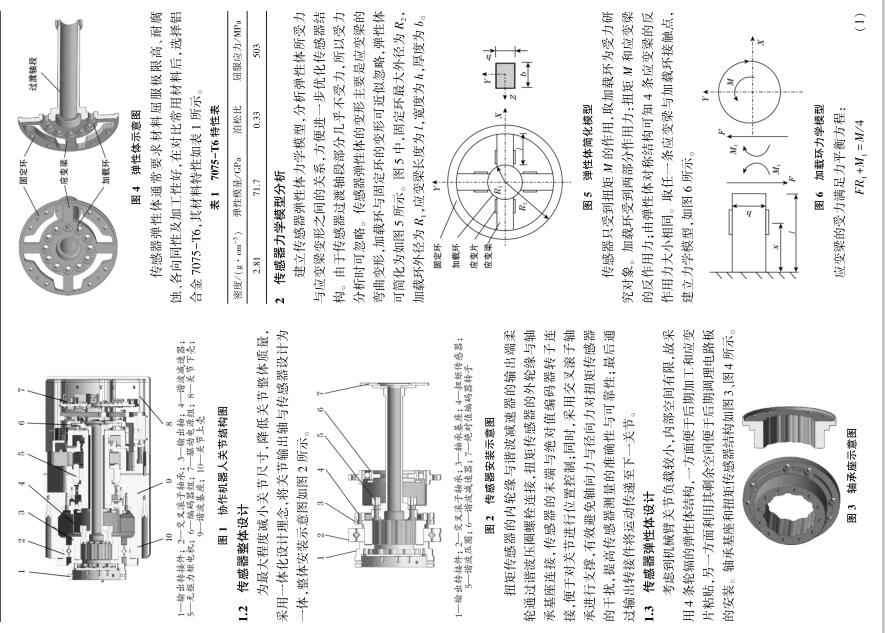
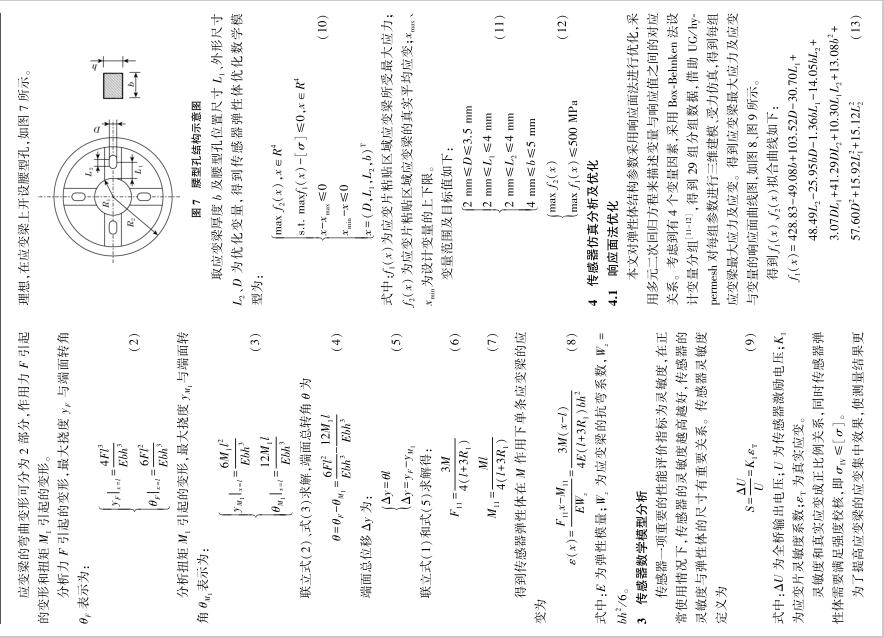
| 扭矩传感器在机器人关节上的应用 为确保协作机器人的安全性,需要在协作机器人关节处安装扭矩传感器,由于协作机器人自身关节尺寸有限且负载比较小,需要一种结构紧凑、灵敏度高的扭矩传感器。 为解决这一难题,在分析传统轮辐式扭矩传感器的基础上,提出了一种机器人关节输出轴和传感器一体化的结构,对传感器弹性体建立力学模型、数学模型,使用响应面法对弹性体结构参数进行优化,根据 Box⁃Behnken 法进行变量设计,然后利用 UG/ Hypermesh 进行有限元仿真验证。 结果表明,优化后的传感器具有良好的抗过载能力、线性度及灵敏度。 Abstract:In order to ensure the safety of the collaborative robot,it is necessary to install torque sensors at the joints of thecollaborative robot.Torque sensors with compact size and high sensitivity are needed due to collaborative robot joint’s size limita⁃tion and small load.To solve this problem,an integrated structure of output shaft and sensor was proposed based on analysis of thetraditional cross⁃beam torque sensor.The mechanical model and mathematical model for the sensor were established.Response sur⁃face methodology was employed to optimize the sensor structural parameters.Variables were designed by Box⁃Behnken design. Then UG/ Hypermesh was used for finite element simulation verification.The results show the optimized sensor has good anti⁃over⁃load capability,linearity and sensitivity. 协作机器人作为新兴产业代表 [1] ,被视为实现中国制造2025 的关键 [2-3] 。 协作机器人由于与人协同工作更强调安全性 [4] ,高灵敏的扭矩传感器能够准确测量机器人关节受力情况,从而确保足够的安全性。 而如何获得最优的传感器弹性体结构一直是设计难题 [5] 。 潘新安等通过将应变片粘贴在谐波减速器柔轮上测量扭矩,但是柔轮的噪声对测量影响很大 [6] ;文献[7]设计了“弹簧离合器”式传感器,能减少关节的碰撞力;文献[8]设计了一款异形体传感器,灵敏度高但弹性体结构复杂难以加工;王罗罗等设计一款带有保护梁的扭矩传感器,测量应变梁的剪切应变,应变较小 [9] ;蒋聪等对轮辐式结构进行了优化设计,加工性好但增加了关节轴向尺寸 [10] 。 本文在详细分析传统关节扭矩传感器测量原理的基础上,基于一体化设计理念,提出了扭矩传感器与输出轴一体化结构,降低了关节轴向尺寸,提高了关节负载/ 自重比。 同时,借助有限元仿真及响应面法,得到了一种扭矩传感器弹性体的优化方法。 1 扭矩传感器需求分析及结构设计 1.1 传感器需求分析 图1 为新一代协作机器人的关节内部结构,即本文传感器设计的应用对象。 由于关节外壳、谐波减速器已确定, 故 传 感 器 最 大 外 径 应 小 于 关 节 上 壳 内 径(63.5 mm),内轮缘上螺栓圆中心线直径为 27 mm,最大高度12 mm。 根据机械臂工况需求,扭矩传感器量程为0~30 N・m,且具有2.5倍的抗过载能力,即传感器能承受75 N・m 的瞬时载荷,载荷释放后,传感器仍可正常工作。 图 1 协作机器人关节结构图 1.2 传感器整体设计 为最大程度减小关节尺寸,降低关节整体质量,采用一体化设计理念,将关节输出轴与传感器设计为一体,整体安装示意图如图 2 所示。
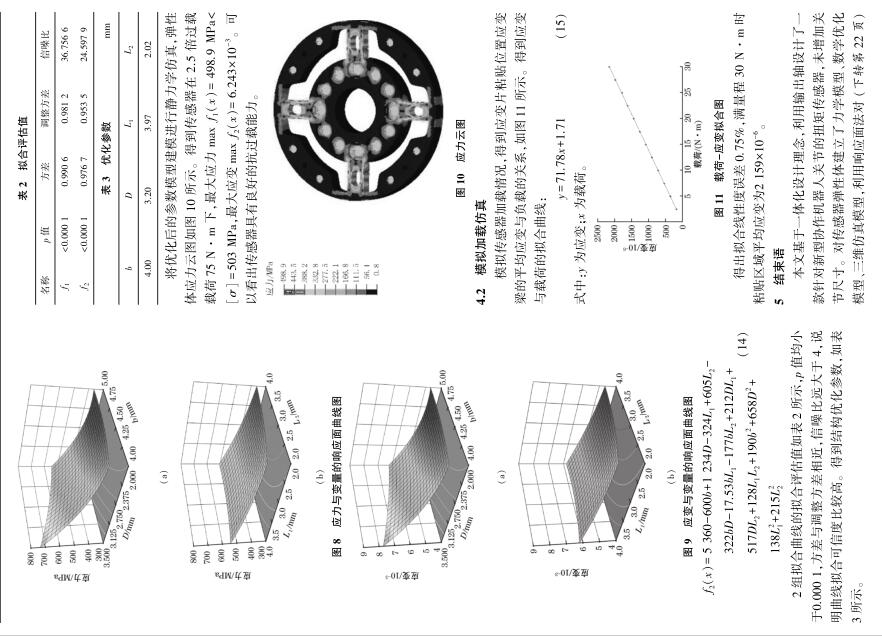
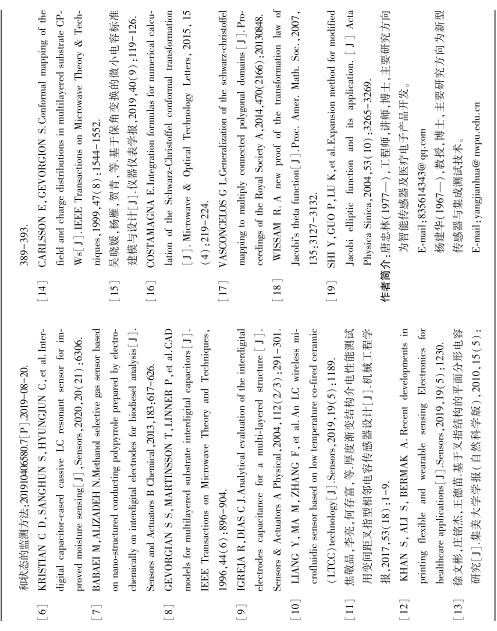
扭矩传感器的内轮缘与谐波减速器的输出端柔轮通过谐波压圈螺栓连接,扭矩传感器的外轮缘与轴承基座连接,传感器的末端与绝对值编码器转子连接,便于对关节进行位置控制;同时,采用交叉滚子轴承进行支撑,有效避免轴向力与径向力对扭矩传感器的干扰,提高传感器测量的准确性与可靠性;最后通过输出转接件将运动传递至下一关节。 1.3 传感器弹性体设计 考虑到机械臂关节负载较小,内部空间有限,故采用 4 条轮辐的弹性体结构,一方面便于后期加工和应变片粘贴,另一方面利用其剩余空间便于后期调理电路板的安装。 轴承基座和扭矩传感器结构如图3、图4 所示。 图 4 弹性体示意图
2 传感器力学模型分析 建立传感器弹性体力学模型,分析弹性体所受力与应变梁变形之间的关系,方便进一步优化传感器结构。 由于传感器过渡轴段部分几乎不受力,所以受力分析时可忽略。 传感器弹性体的变形主要是应变梁的弯曲变形,加载环与固定环的变形可近似忽略,弹性体可简化为如图 5 所示。 图 5 中,固定环最大外径为 R 2 ,加载环外径为 R 1 ,应变梁长度为 l,宽度为 h,厚度为 b。 图 5 弹性体简化模型
 |
| 【刷新页面】【加入收藏】【打印此文】 【关闭窗口】 |
| 上一篇:机电测试技术采用CAI的方法和注意事项 下一篇:底盘测功机校准装置滑行时间和速度校准 |
服务咨询热线:
400-111-3688