ZJ-FZ型法兰式静态扭矩传感器被广泛应用于试验机、扭力扳手、转向机、电动执行器、阀门、液压等静止扭矩测试系统中,由于出色的稳定性、较高的测量精度和极高的性价比而受到用户的青睐。
技术指标
1.频率响应100μs
2.绝缘强度:200MΩ(100V)
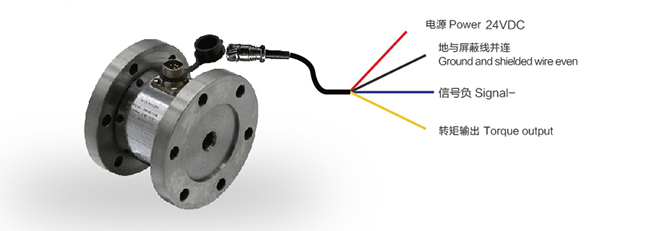
3.供电:DC12~24V 电流≥50mA
4.输出信号:电流4~20mA,电压1~5V,
频率方波10KHz/±5 KHz(可选)
5.扭矩传感器内阻:1000Ω
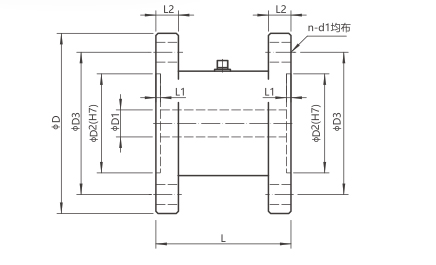
外形安装尺寸图
|
型号
|
量程
|
L
|
D
|
D1
|
D2
|
D3
|
n-d1
|
|
ZJ-5FZ
|
5
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-10FZ
|
10
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-20FZ
|
20
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-50FZ
|
50
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-100FZ
|
100
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-(200/300/400/500)FZ
|
200/300/400/500
|
70
|
100
|
16
|
62
|
82
|
6-M10
|
|
ZJ-(1000/2000)FZ
|
1000/2000
|
75
|
116
|
20
|
72
|
94
|
6-M12
|
|
ZJ-5000FZ
|
5000
|
85
|
165
|
25
|
115
|
142
|
8-M12
|
|
ZJ-10000FZ
|
10000
|
95
|
205
|
40
|
135
|
173
|
8-M18
|
|
ZJ-(20K/30K)FZ
|
20K/30K
|
115
|
245
|
50
|
155
|
205
|
8-M20
|
|
ZJ-(40K/50K/60K)FZ
|
40K/50K/60K
|
120
|
280
|
50
|
200
|
240
|
10-M20
|
|
ZJ-100KFZ
|
100K
|
150
|
318
|
50
|
230
|
274
|
10-M24
|
量程200K~2000K N•m参数来电索取 可非标定制
扭矩测量广泛应用于汽车,航空,航天,航模,电力,汽车,能源化工等等各个工业领域,正确的进行扭矩测量是产品研发性能检测、状态监测自动控制,节能动力平衡指示的保证,所以说今天我们就来聊一聊扭矩测量的相关技术支持。
我们先来看一下扭矩的定义,扭矩就是使机械构件产生转动效应,并伴随扭转变形的力或者是力矩,也叫做转矩,单位是牛米,转矩符号呢是由右手螺旋法则确定的,也就是说你的右手大拇指所指的方向,就是扭矩的方向,其中扭矩矢量我们规定,它的指向与截面的位法线方向一致的时候呢是正,反正就是负。扭矩有力偶和力矩两种表现形式,力矩就是我们在高中物理里面所学的作用力使物体绕着转动轴或者是支点转动的趋向,他的公式就是力矩等于力乘以力臂。
那对于力偶是作用于刚体上的一对大小相等作用相反,力偶和力矩的表达式虽然是相同的,但是呢它们是有区别的,力偶的对象上周五接下的作用产生的是存留局,力矩是构建单边受理,相当于镜像力F1撇和6fl的复合作用效应,构件在静压力F1撇的作用下受到弯矩作用,使得轴承摩擦阻力增加,在实际应用中我们在做现场标定的时候,很多人家采用力*力臂方式,这种方式呢,就会产生径向力和弯矩的问题。对于旋转机械我们又有这样两个公式,一个就是有扭距等于转动惯量乘以角加速度,另外一个就是扭矩等于9.55功率除以转速,为了大家更好的理解扭矩这些公式,我将力学方面的相关的定律给大家复习一下。
牛顿的三大定律,那牛顿的第一定律,力是改变物体运动状态的原因,也就是说物体在没有受到力或者是合力为0的时候,总是保持匀速直线运动或者静止状态,那对应到扭矩这一块来,就是物体在没有受到扭矩的作用是或者是扭矩为0的时候就,总是保持匀速旋转或者是静止状态。
牛顿第二定律讲了力和物体的质量加速度的关系,也就是说F=ma那对应的扭矩这就是扭矩等于转动惯量乘以角加速度。
牛顿第三定律他讲了力是物体间的相互作用,也就是说两个物体之间的作用力和反作用力,总是同时在一条直线上,大小相等,方向相反。
我们扭矩测量里面的一种反作用力扭矩测量就是采用的这种原理。我们经常听到有人在问扭矩传感器测量的是驱动扭矩、负载扭矩还是其他什么扭矩,那这里我就做了一个简化的模型,那M0里那就分别代表着平衡的驱动与负载,那这个假想截面就相当于我们的扭矩传感器,我们采用截面法可以来进行分析,截面板加这个轴系分为了左右两侧,左右两侧分别有Y6M0和内6T和T1撇,平衡方式可知T撇是等于M0=T的。因为呢,T和T撇是同一截面上的内力,它们应该有相同的大小和正负的,对于他T和T撇的方向,我们可以按照右手螺旋法则来确定,我们可以看到在左侧我们四指直线T的这个方向,那我们的大拇指指向右又那这时候呢,他的扭矩矢量的指向是以截面的外环线方向是一致的,所以说这时候它是正的,而对于呢也同样的,我们是指指向他的扭矩加载的方向,拿大拇指是指向左侧的,同样它也是指向了截面的Y法线的方向,所以说它也是正的,以上就解释了我们为什么说有一句传感器可以考察整个周期中任意点的扭矩,由于实际工作中我们要考虑了整个轴系的质量,那我们可以思考一下,对于我们需要测量虚构扭矩来讲,扭矩传感器应该安装在更靠近驱动侧还是负载侧?
为了更好的让大家理解截面法,那我来聊一聊扭矩图,那扭矩图就是以平行于杆轴线的坐标,X表示截面的位置,以垂直于X轴的坐标截面表示,前面有句子这张图我给出了一个传动系统的一个简化模型,那一般呢会直接给出功率转速值,那我们为了简便就做了一个简化,那对于这个图的扭矩图怎么来画呢?结果就是这样。我们取左端为参考正项,那所有的截面我们也从左侧的截面来看,我们对ab段我们可以看到,我们可以看到ab段的内力偶为10千牛米,那对于BC段我们可以看到BC段的内力偶,10+10=20,对于CD段,那它的内力偶为10+10-40=-20千牛米,同样如果我们从右侧去看的话,我们可以得出同样的结果。
| 



